|
RT-Thread RTOS 1.2.0
An open source embedded real-time operating system
|
|
RT-Thread RTOS 1.2.0
An open source embedded real-time operating system
|
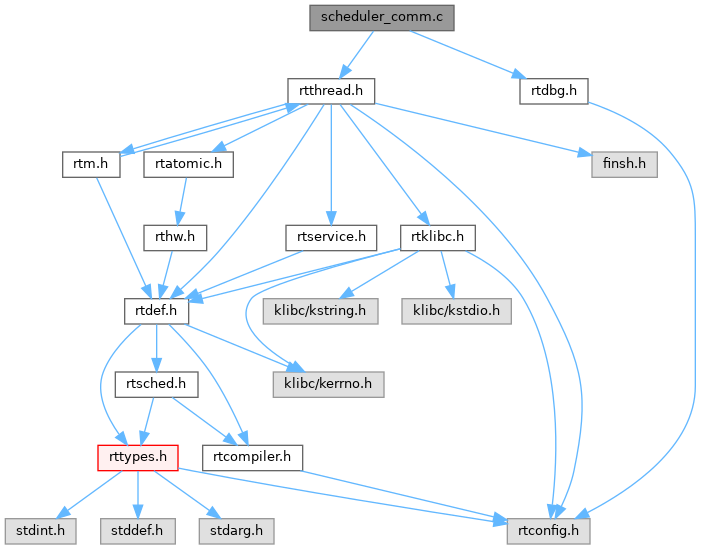
 scheduler_comm.c 的引用(Include)关系图:
scheduler_comm.c 的引用(Include)关系图:宏定义 | |
| #define | DBG_TAG "kernel.sched" |
| #define | DBG_LVL DBG_INFO |
函数 | |
| void | rt_sched_thread_init_ctx (struct rt_thread *thread, rt_uint32_t tick, rt_uint8_t priority) |
| rt_err_t | rt_sched_thread_timer_start (struct rt_thread *thread) |
| rt_err_t | rt_sched_thread_timer_stop (struct rt_thread *thread) |
| rt_uint8_t | rt_sched_thread_get_stat (struct rt_thread *thread) |
| rt_uint8_t | rt_sched_thread_get_curr_prio (struct rt_thread *thread) |
| rt_uint8_t | rt_sched_thread_get_init_prio (struct rt_thread *thread) |
| rt_uint8_t | rt_sched_thread_is_suspended (struct rt_thread *thread) |
| rt_err_t | rt_sched_thread_close (struct rt_thread *thread) |
| rt_err_t | rt_sched_thread_yield (struct rt_thread *thread) |
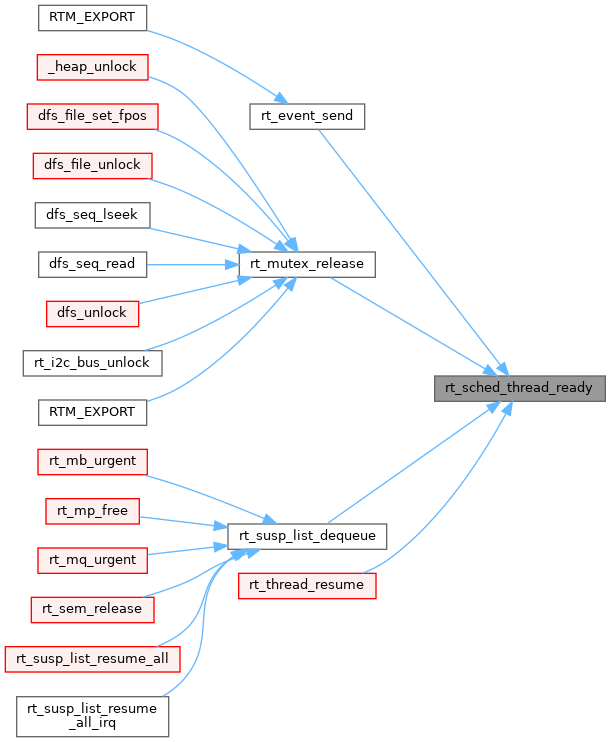
| rt_err_t | rt_sched_thread_ready (struct rt_thread *thread) |
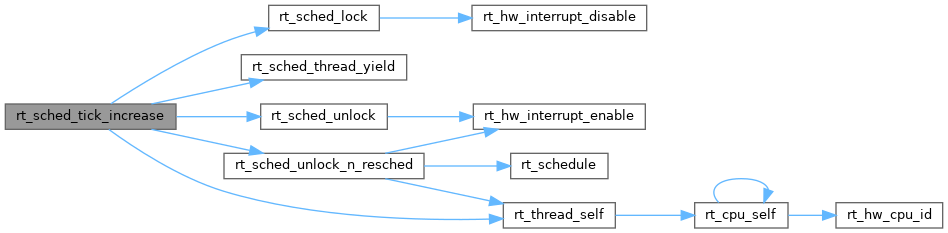
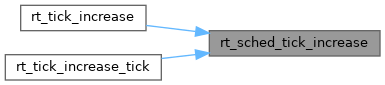
| rt_err_t | rt_sched_tick_increase (rt_tick_t tick) |
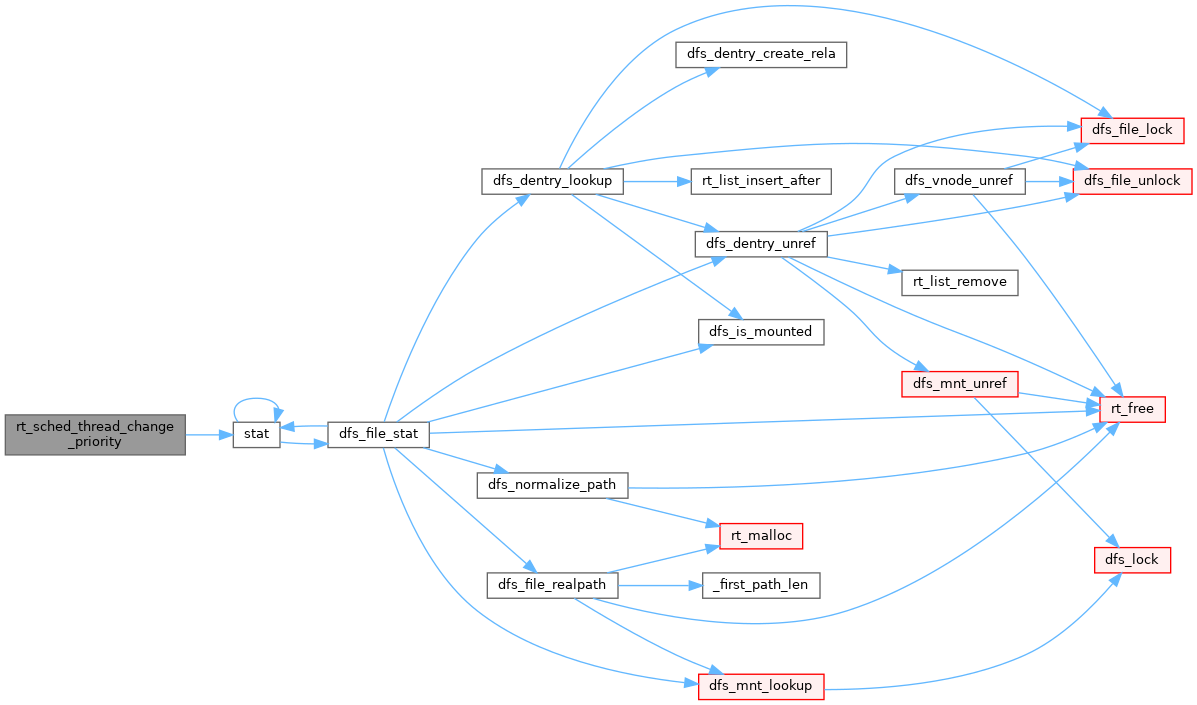
| rt_err_t | rt_sched_thread_change_priority (struct rt_thread *thread, rt_uint8_t priority) |
| #define DBG_TAG "kernel.sched" |
在文件 scheduler_comm.c 第 13 行定义.
| #define DBG_LVL DBG_INFO |
在文件 scheduler_comm.c 第 14 行定义.
| void rt_sched_thread_init_ctx | ( | struct rt_thread * | thread, |
| rt_uint32_t | tick, | ||
| rt_uint8_t | priority ) |
在文件 scheduler_comm.c 第 19 行定义.
引用了 RT_SCHED_CTX , 以及 RT_THREAD_INIT.
在文件 scheduler_comm.c 第 33 行定义.
引用了 RT_SCHED_CTX , 以及 RT_SCHED_DEBUG_IS_LOCKED.
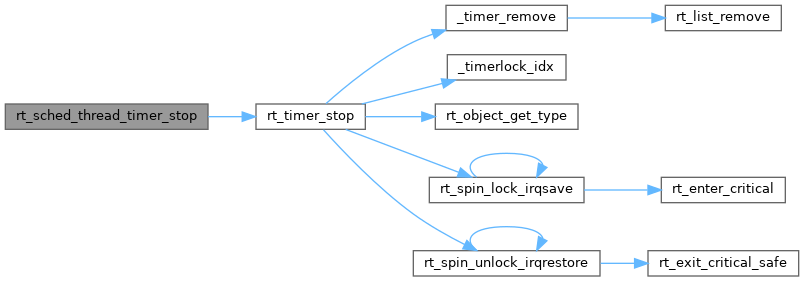
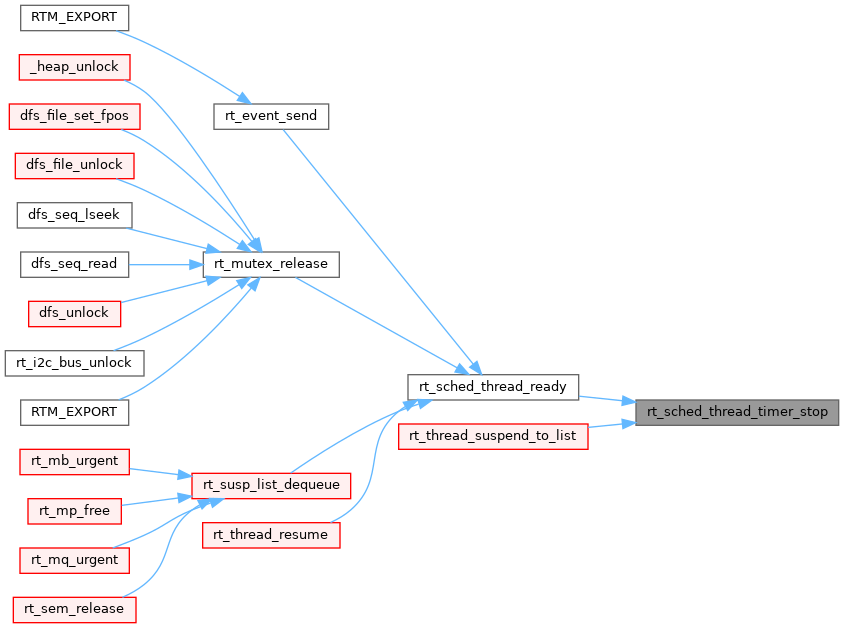
这是这个函数的调用关系图:在文件 scheduler_comm.c 第 40 行定义.
引用了 RT_SCHED_CTX, RT_SCHED_DEBUG_IS_LOCKED, rt_timer_stop() , 以及 rt_thread::thread_timer.
函数调用图: 这是这个函数的调用关系图:| rt_uint8_t rt_sched_thread_get_stat | ( | struct rt_thread * | thread | ) |
在文件 scheduler_comm.c 第 59 行定义.
引用了 RT_SCHED_CTX, RT_SCHED_DEBUG_IS_LOCKED , 以及 RT_THREAD_STAT_MASK.
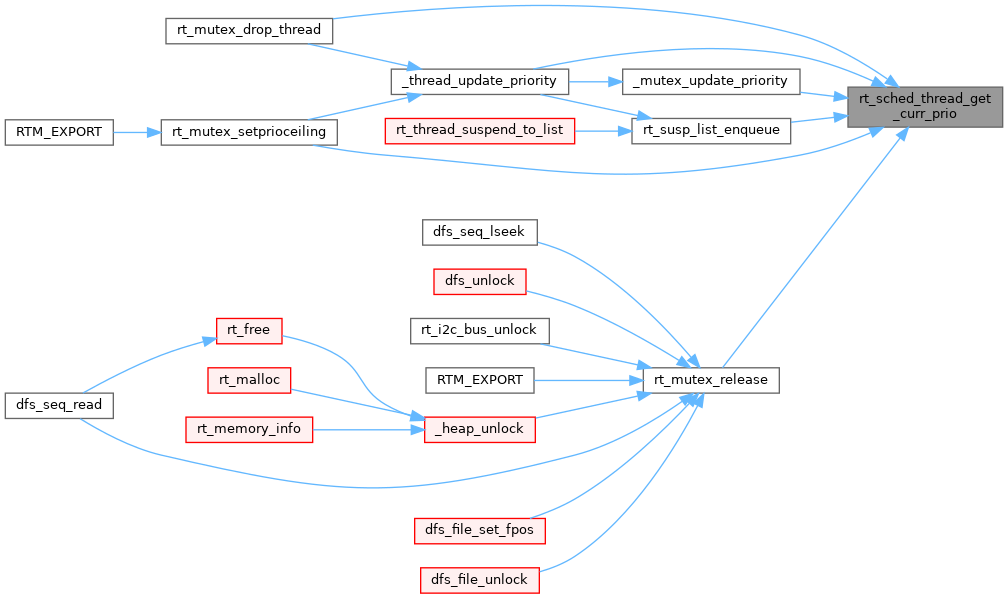
这是这个函数的调用关系图:| rt_uint8_t rt_sched_thread_get_curr_prio | ( | struct rt_thread * | thread | ) |
在文件 scheduler_comm.c 第 65 行定义.
引用了 RT_SCHED_DEBUG_IS_LOCKED , 以及 RT_SCHED_PRIV.
这是这个函数的调用关系图:| rt_uint8_t rt_sched_thread_get_init_prio | ( | struct rt_thread * | thread | ) |
在文件 scheduler_comm.c 第 71 行定义.
引用了 RT_SCHED_PRIV.
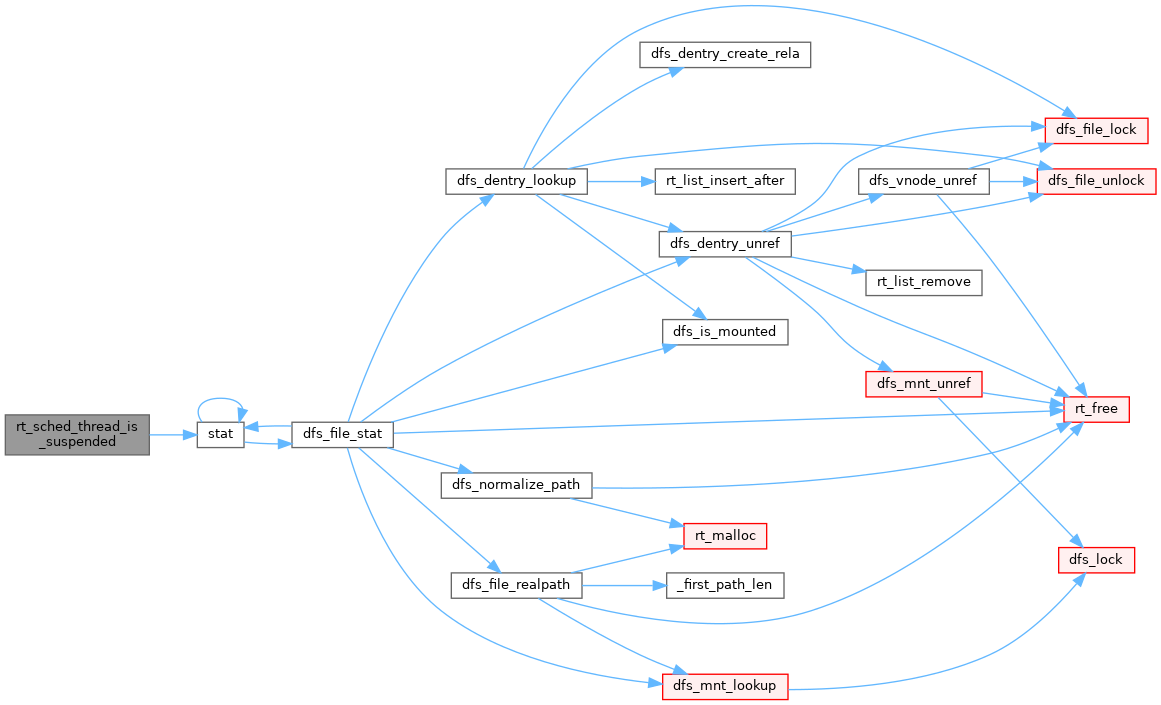
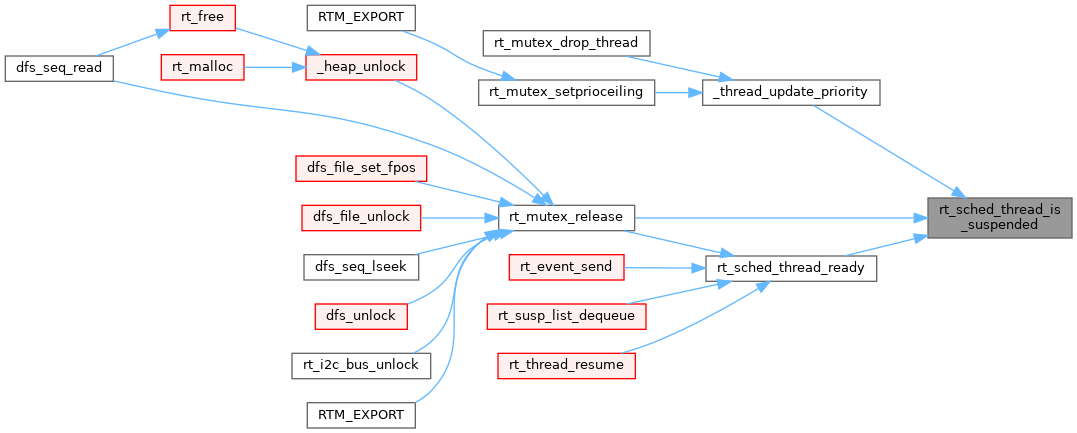
这是这个函数的调用关系图:| rt_uint8_t rt_sched_thread_is_suspended | ( | struct rt_thread * | thread | ) |
在文件 scheduler_comm.c 第 80 行定义.
引用了 RT_SCHED_CTX, RT_SCHED_DEBUG_IS_LOCKED, RT_THREAD_SUSPEND_MASK , 以及 stat().
函数调用图: 这是这个函数的调用关系图:在文件 scheduler_comm.c 第 86 行定义.
引用了 RT_SCHED_CTX, RT_SCHED_DEBUG_IS_LOCKED , 以及 RT_THREAD_CLOSE.
这是这个函数的调用关系图:在文件 scheduler_comm.c 第 93 行定义.
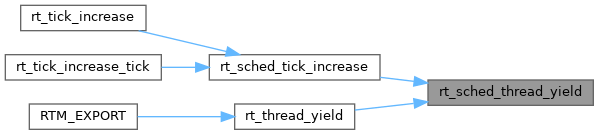
引用了 RT_SCHED_CTX, RT_SCHED_DEBUG_IS_LOCKED, RT_SCHED_PRIV , 以及 RT_THREAD_STAT_YIELD.
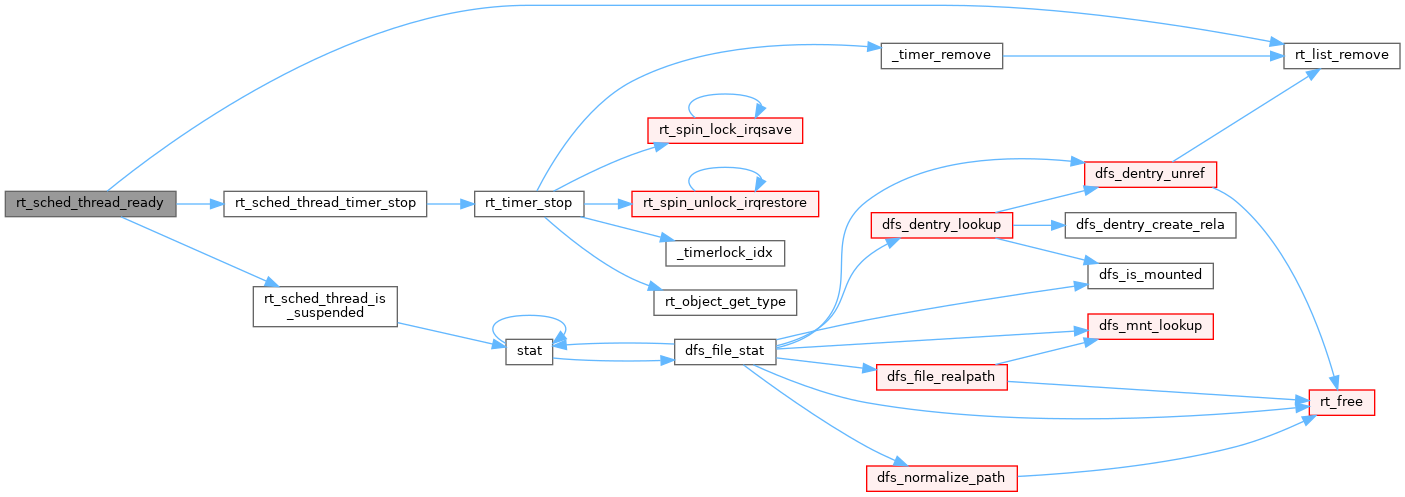
这是这个函数的调用关系图:Quiet timeout timer first if set. and don't continue if we failed, because it probably means that a timeout ISR racing to resume thread before us.
在文件 scheduler_comm.c 第 103 行定义.
引用了 rt_list_remove(), RT_NULL, RT_SCHED_CTX, RT_SCHED_DEBUG_IS_LOCKED, rt_sched_thread_is_suspended(), rt_sched_thread_timer_stop() , 以及 RT_THREAD_LIST_NODE.
函数调用图: 这是这个函数的调用关系图:在文件 scheduler_comm.c 第 147 行定义.
引用了 rt_sched_lock(), RT_SCHED_PRIV, rt_sched_thread_yield(), rt_sched_unlock(), rt_sched_unlock_n_resched() , 以及 rt_thread_self().
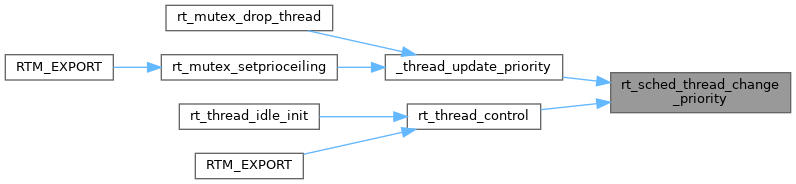
函数调用图: 这是这个函数的调用关系图:| rt_err_t rt_sched_thread_change_priority | ( | struct rt_thread * | thread, |
| rt_uint8_t | priority ) |
Update priority of the target thread
在文件 scheduler_comm.c 第 183 行定义.
引用了 RT_ASSERT, RT_SCHED_CTX, RT_SCHED_DEBUG_IS_LOCKED, RT_SCHED_PRIV, RT_THREAD_INIT, RT_THREAD_READY, RT_THREAD_STAT_MASK , 以及 stat().
函数调用图: 这是这个函数的调用关系图: