|
RT-Thread RTOS 1.2.0
An open source embedded real-time operating system
|
|
RT-Thread RTOS 1.2.0
An open source embedded real-time operating system
|
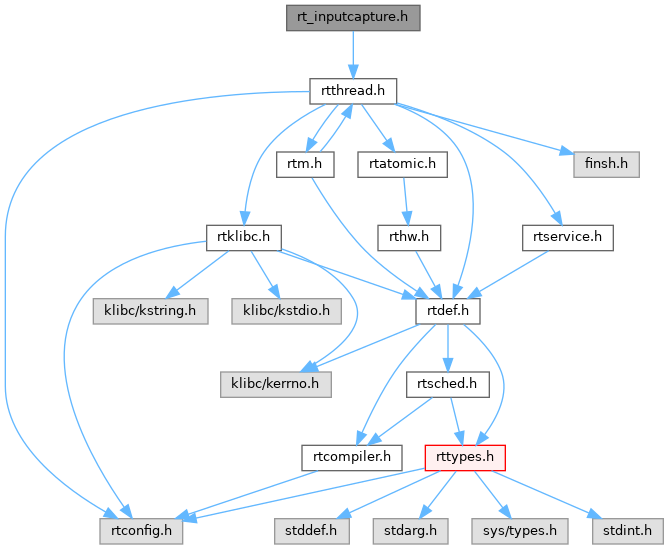
#include <rtthread.h> rt_inputcapture.h 的引用(Include)关系图:
rt_inputcapture.h 的引用(Include)关系图:结构体 | |
| struct | rt_inputcapture_data |
| struct | rt_inputcapture_device |
| struct | rt_inputcapture_ops |
宏定义 | |
| #define | INPUTCAPTURE_CMD_CLEAR_BUF (128 + 0) /* clear capture buf */ |
| #define | INPUTCAPTURE_CMD_SET_WATERMARK (128 + 1) /* Set the callback threshold */ |
函数 | |
| void | rt_hw_inputcapture_isr (struct rt_inputcapture_device *inputcapture, rt_bool_t level) |
| rt_err_t | rt_device_inputcapture_register (struct rt_inputcapture_device *inputcapture, const char *name, void *data) |
| #define INPUTCAPTURE_CMD_CLEAR_BUF (128 + 0) /* clear capture buf */ |
在文件 rt_inputcapture.h 第 21 行定义.
| #define INPUTCAPTURE_CMD_SET_WATERMARK (128 + 1) /* Set the callback threshold */ |
在文件 rt_inputcapture.h 第 22 行定义.
| void rt_hw_inputcapture_isr | ( | struct rt_inputcapture_device * | inputcapture, |
| rt_bool_t | level ) |
| rt_err_t rt_device_inputcapture_register | ( | struct rt_inputcapture_device * | inputcapture, |
| const char * | name, | ||
| void * | data ) |