|
RT-Thread RTOS 1.2.0
An open source embedded real-time operating system
|
|
RT-Thread RTOS 1.2.0
An open source embedded real-time operating system
|
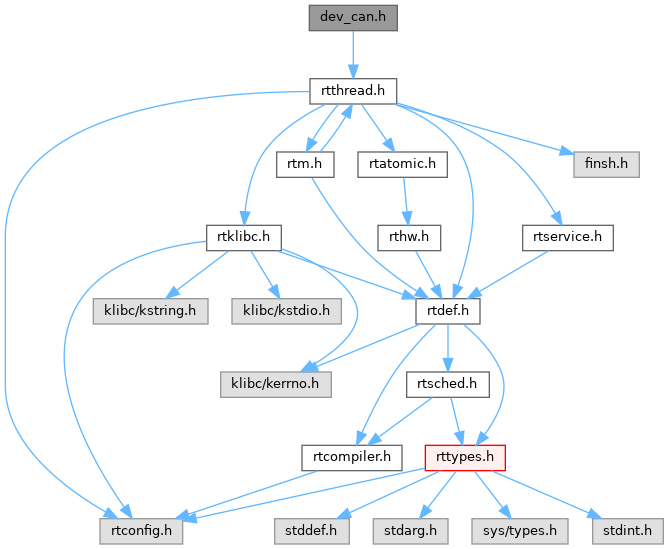
#include <rtthread.h> dev_can.h 的引用(Include)关系图:
dev_can.h 的引用(Include)关系图:结构体 | |
| struct | rt_can_filter_item |
| struct | rt_can_filter_config |
| struct | rt_can_bit_timing |
| struct | rt_can_bit_timing_config |
| struct | can_configure |
| struct | rt_can_status |
| struct | rt_can_status_ind_type |
| struct | rt_can_device |
| struct | rt_can_msg |
| struct | rt_can_msg_list |
| struct | rt_can_rx_fifo |
| struct | rt_can_sndbxinx_list |
| struct | rt_can_tx_fifo |
| struct | rt_can_ops |
类型定义 | |
| typedef rt_err_t(* | rt_canstatus_ind) (struct rt_can_device *, void *) |
| typedef struct rt_can_status_ind_type * | rt_can_status_ind_type_t |
| typedef void(* | rt_can_bus_hook) (struct rt_can_device *) |
| typedef struct rt_can_device * | rt_can_t |
| typedef struct rt_can_status * | rt_can_status_t |
| typedef struct rt_can_msg * | rt_can_msg_t |
枚举 | |
| enum | CAN_DLC { CAN_MSG_0BYTE = 0 , CAN_MSG_1BYTE , CAN_MSG_2BYTES , CAN_MSG_3BYTES , CAN_MSG_4BYTES , CAN_MSG_5BYTES , CAN_MSG_6BYTES , CAN_MSG_7BYTES , CAN_MSG_8BYTES , CAN_MSG_12BYTES , CAN_MSG_16BYTES , CAN_MSG_20BYTES , CAN_MSG_24BYTES , CAN_MSG_32BYTES , CAN_MSG_48BYTES , CAN_MSG_64BYTES } |
| enum | CANBAUD { CAN1MBaud = 1000UL * 1000 , CAN800kBaud = 1000UL * 800 , CAN500kBaud = 1000UL * 500 , CAN250kBaud = 1000UL * 250 , CAN125kBaud = 1000UL * 125 , CAN100kBaud = 1000UL * 100 , CAN50kBaud = 1000UL * 50 , CAN20kBaud = 1000UL * 20 , CAN10kBaud = 1000UL * 10 } |
| enum | RT_CAN_STATUS_MODE { NORMAL = 0 , ERRWARNING = 1 , ERRPASSIVE = 2 , BUSOFF = 4 } |
| enum | RT_CAN_BUS_ERR { RT_CAN_BUS_NO_ERR = 0 , RT_CAN_BUS_BIT_PAD_ERR = 1 , RT_CAN_BUS_FORMAT_ERR = 2 , RT_CAN_BUS_ACK_ERR = 3 , RT_CAN_BUS_IMPLICIT_BIT_ERR = 4 , RT_CAN_BUS_EXPLICIT_BIT_ERR = 5 , RT_CAN_BUS_CRC_ERR = 6 } |
函数 | |
| rt_err_t | rt_hw_can_register (struct rt_can_device *can, const char *name, const struct rt_can_ops *ops, void *data) |
| void | rt_hw_can_isr (struct rt_can_device *can, int event) |
| enum CAN_DLC |
| enum CANBAUD |